如何在 OpenCV Python 中实现概率霍夫变换?
opencvpythonserver side programmingprogramming
概率霍夫变换是霍夫变换的优化。霍夫变换需要大量计算,即使对于具有两个参数的线也是如此。概率霍夫变换不会考虑所有点,它只考虑随机子集的点,这足以进行线检测。我们可以按照下面给出的步骤在图像上实现概率霍夫变换-
导入所需的库。在以下所有示例中,所需的 Python 库是 OpenCV。确保您已经安装了它。
使用 cv2.imread() 读取输入图像。使用此方法读取的 RGB 图像为 BGR 格式。可选择将读取的 BGR 图像分配给 img。
现在使用 cv2.cvtColor() 函数将此 BGR 图像转换为灰度图像,如下所示。可选择将转换后的灰度图像指定为灰色。
对灰度图像应用阈值处理,将其转换为二值图像。调整第二个参数 (threshValue) 以获得更好的二值图像。
使用 Canny 边缘检测器在二值图像中查找边缘(您可以使用任何其他边缘检测器来检测边缘)。
edges = cv2.Canny(gray,50,200,apertureSize = 3)
使用 cv2.HoughLinesP() 对边缘图像应用概率霍夫变换。它返回检测到的线的坐标。
lines = cv2.HoughLinesP(edges, 1, np.pi/180, 50, minLineLength, maxLineGap)
在图像上绘制线条并显示输出图像。
让我们看一些例子以便更清楚地理解。
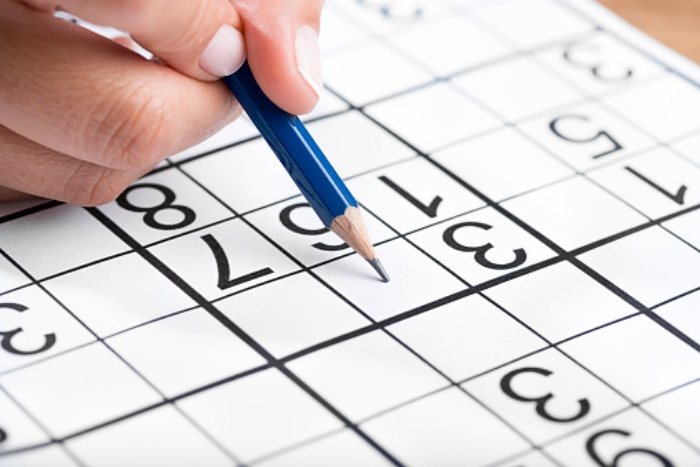
输入图像
我们将在下面的例子中使用此图像作为输入文件。
示例
在此示例中,我们使用以下内容在图像上找到概率霍夫线变换线条属性 −
minLineLength = 10
maxLineGap = 5
# import required libraries import cv2 import numpy as np # read the input image img = cv2.imread('sudoku.jpg') # convert the input image to grayscale image gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # find the edges using Canny edge detector edges = cv2.Canny(gray,50,200,apertureSize = 3) minLineLength = 10 maxLineGap = 5 # apply probabilistic Hough transform lines = cv2.HoughLinesP(edges,1,np.pi/180,50,minLineLength,maxLineGap) for line in lines: for x1,y1,x2,y2 in line: cv2.line(img,(x1,y1),(x2,y2),(0,255,0),2) cv2.imshow('houghlines.jpg',img) cv2.imshow('edges', edges) cv2.waitKey(0) cv2.destroyAllWindows()
输出
运行上述程序时,它将生成以下窗口 -
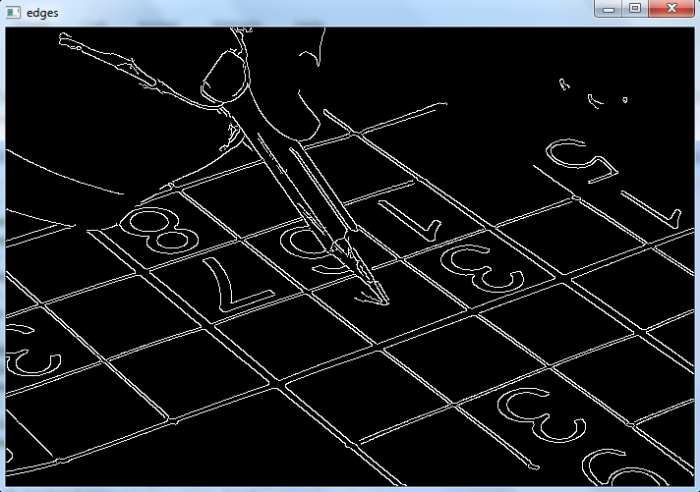
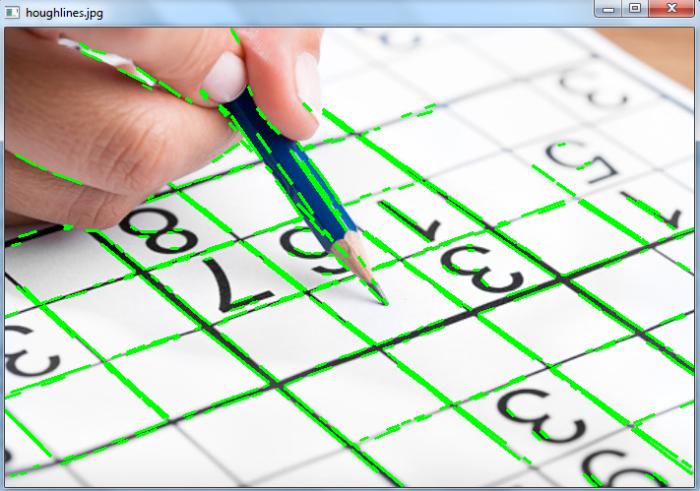
第一个窗口"Edges"显示使用 Canny 边缘检测算法检测到的边缘。第二个窗口"houghlines.jpg"显示使用概率 Hough Line 变换检测到的线条。